问题分诊室



点赞
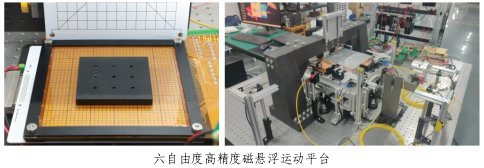
六自由度高精度磁悬浮运动平台
发布时间:2025-12-31
基本信息
- 合作方式: 技术转让
- 成果类型:
价格
双方协商
行业领域
高新技术改造传统产业,先进制造技术,新型机械
成果描述
本成果针对高精度装备中机械传动引起的摩擦磨损、运动耦合、精度不足及维护成本高等行业共性难题,提出了一种基于电磁力动态解耦与多传感器融合的 磁悬浮运动控制方法,突破了六自由度独立高精度控制、纳米级位置测量与高动 态低功耗驱动等关键技术瓶颈,攻克了平面多匝柔性线圈设计、高精度电流功率 放大与神经网络辅助位姿检测等核心技术,成功研制出六自由度高精度磁悬浮运 动平台系统。该装备解决了传统运动平台误差传递导致的精度衰减、振动噪声大、响应速度慢等问题,实现了纳米级定位精度、全自由度无摩擦运动与控制系统的自主可控。与国内外同类产品相比,其核心竞争力体现在六自由度完全解耦、纳米级精度定位、更高的力密度和更低的运行发热,同时具备更优的动态响应性能和长期可靠性。
成果资料



 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20