问题分诊室
读懂你的步伐:智能助行器人机协同之路
发布时间: 2025-08-18
随着人口结构的变化和技术的不断进步,智能助行器的研发已成为提升行动不便人群生活质量和独立性的关键研究领域。《科技导报》邀请相关领域研究人员撰文,文章介绍了智能助行器的应用背景和市场需求,探讨了人机交互技术的研究进展,提出了未来研究应聚焦于优化运动意图识别算法、开发复杂环境下的导航策略、加强交互安全性研究以及推动多模态融合交互技术的发展,以期实现更精准的意图识别,达到更高效的人−机−环系统协同水平,助力步态障碍患者实现独立自主的生活目标。
随着全球人口老龄化的加剧,老年人口比例不断上升。据国家统计数据报告,截至2024年,中国已经进入中度老龄化时代。此外,全球每年有数百万残障人士和其他运动障碍患者也面临行走困难的问题,仅中国目前就有残疾人8500万。为帮助行动不便患者实现日常生活中的自主移动,多种助行设备应运而生,其中,助行器成为老年人日常活动与康复训练的理想选择。
传统的助行设备只能提供机械支撑,功能较为单一,无法根据用户的实际情况进行调整,尤其是在复杂环境中的导航和适应能力方面存在不足。为了克服这些问题,诞生了智能助行器,它们可通过配备的多种传感器监控用户及环境的运动信息,以确保用户安全和自由地移动。
随着人口结构的变化和技术的不断进步,智能助行器的研发已成为提升行动不便人群生活质量和独立性的关键研究领域。然而,当前智能助行器在人机交互、运动意图识别、环境适应性以及安全性等方面仍面临诸多挑战。为了进一步推动智能助行器技术的发展,满足日益增长的市场需求,深入研究其人机交互策略显得尤为重要。
1
基于运动信号的人机交互智能助行系统
通过对运动信号的感知与分析,智能助行器能够实时捕捉使用者的运动意图,并据此提供相应的干预与辅助,从而显著提升用户的行走安全性和舒适性。
1.1 基于运动信号的人体运动感知
基于运动信号的感知是最早应用于智能助行器上的感知方式,也是使用最广泛、最可靠的感知方式。通常采用布置在助行器上的多轴力传感器、惯性测量单元(IMU)、加速度计等传感器采集使用者的肢体动作及助行器的运动角度、速度、位置、受力等信号,从而判断使用者及助行器的运动趋势和状态。PAMM是2000年由麻省理工学院团队研制的一款用于个人移动和监控的辅助设备,是最早的智能助行器之一,构型及主要参数见图1。
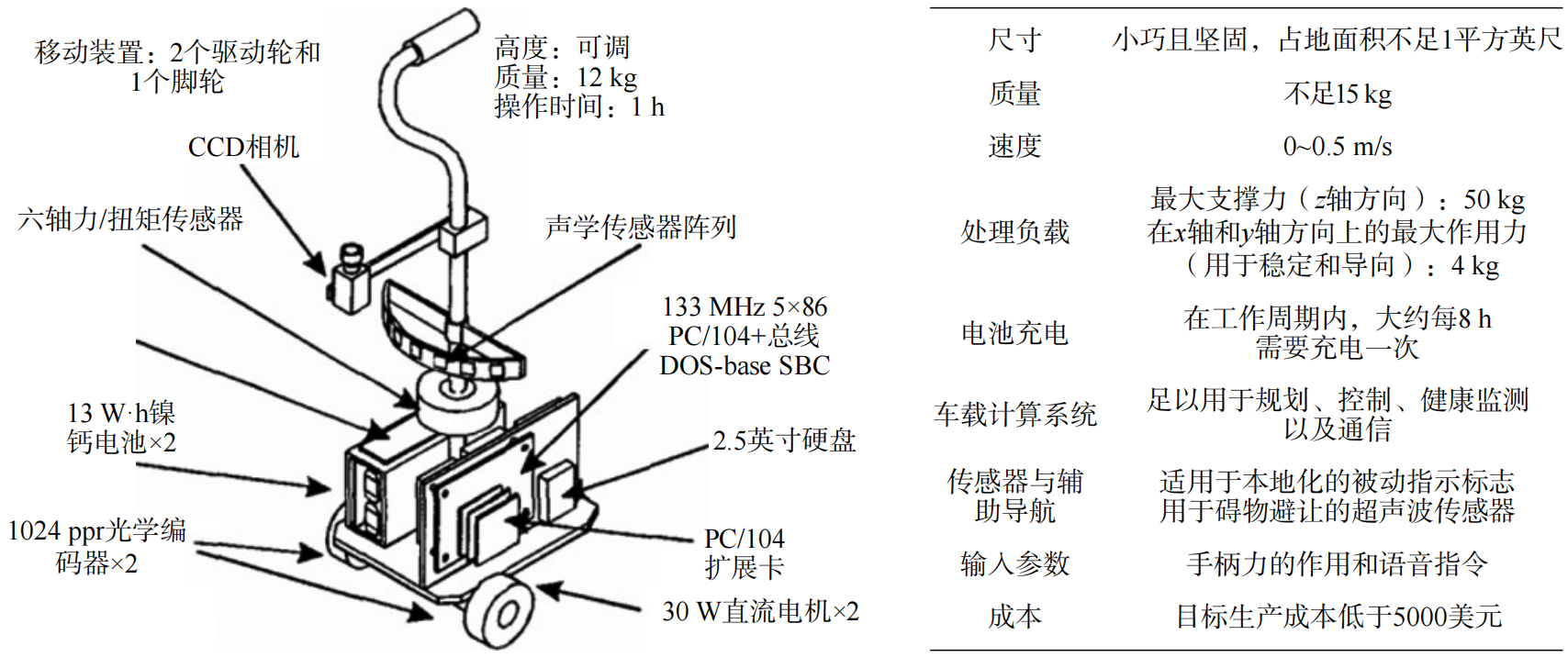
图1 PAMM助行器的配置及参数
PAMM开创了使用运动信号解读用户运动意图的方式,此后大量的研究团队进行了深入探索。有一些研究者使用可穿戴设备来检测用户的运动数据,结合固定在助行器上的传感器,从而综合感知使用者的运动情况。如华中科技大学Huang等于2015年研发的智能助行器,结合了无线可穿戴传感器与智能助行器系统,可以检测用户的异常姿态,如摔倒等,并给予保护(图2)。
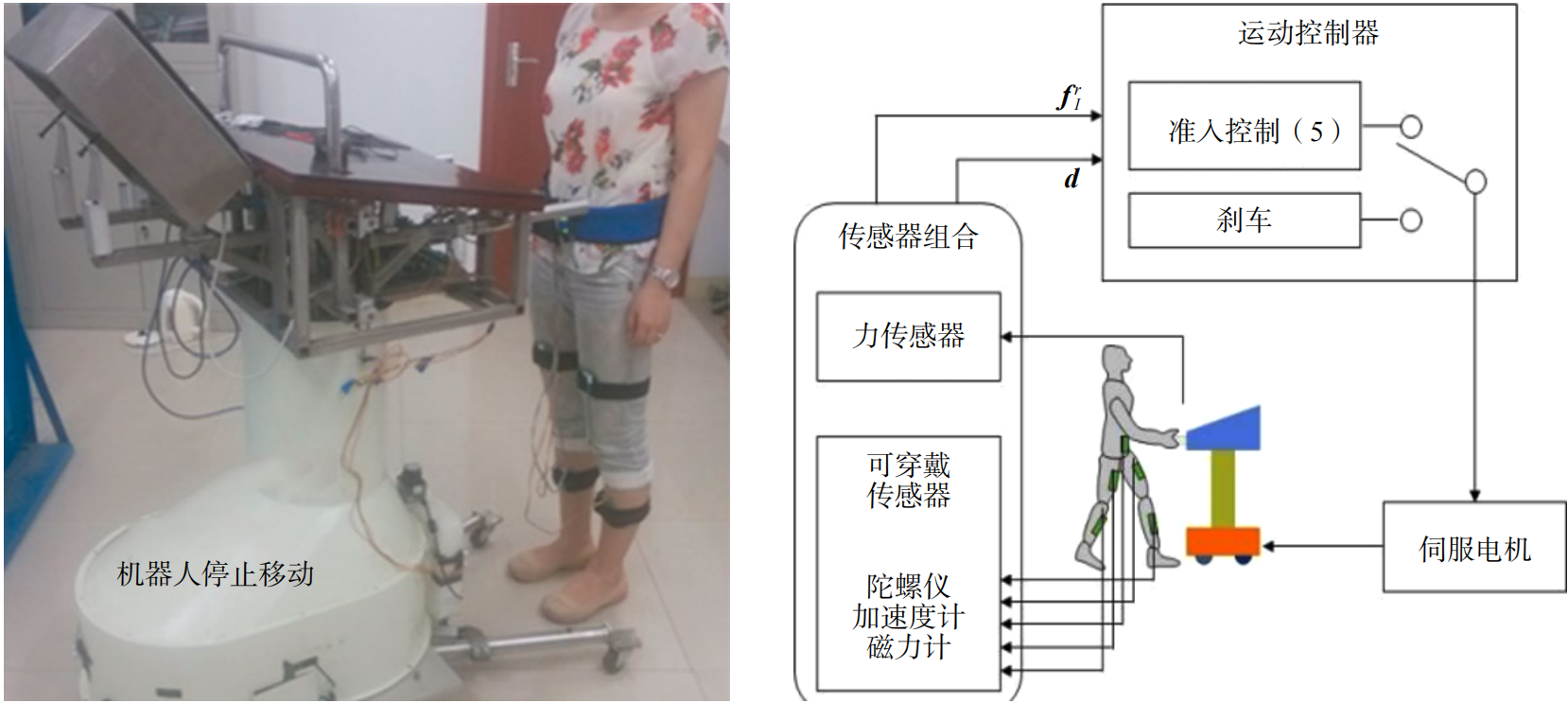
图2 结合可穿戴传感器的智能助行器
为进一步提高人机交互的平滑性,使用户使用助行器时更加自然,研究人员对此做出了不懈努力。如2018年Wang等开发了一种结合可穿戴设备和固定式测量传感器的助行系统(图3)。该设计试图通过机械结构减少人机交互界面的刚性冲击,增强人机交互的自然性和舒适性。
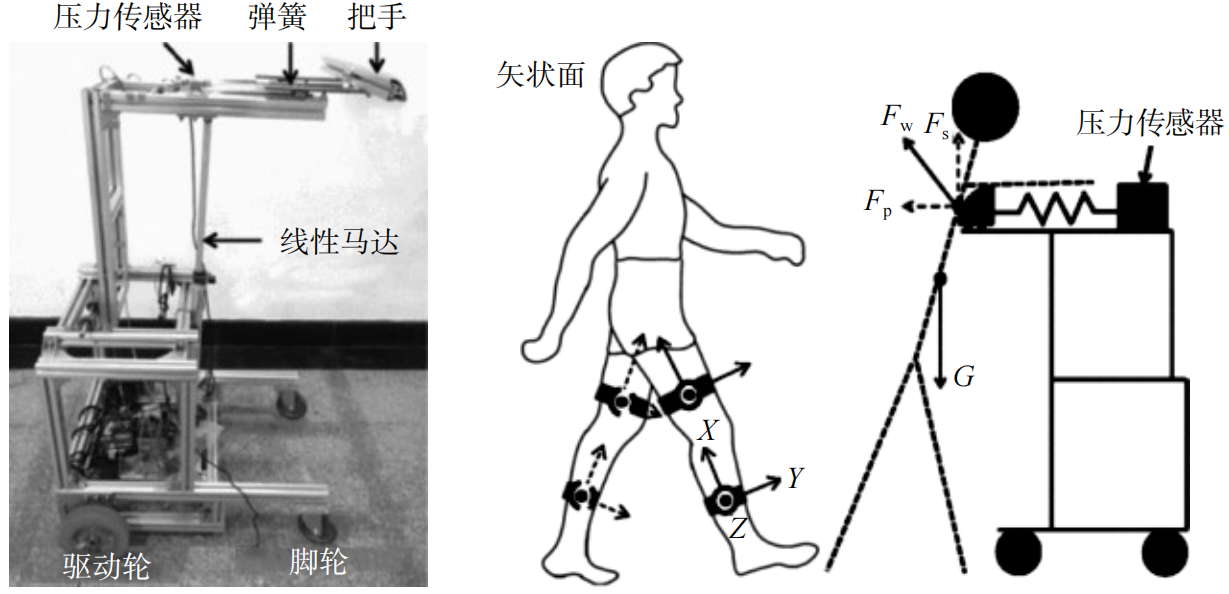
图3 结合可穿戴设备和固定式测量传感器的助行系统
基于运动信号的感知是一种监测用户与设备之间物理交互的简单且直观的方式,能够实时响应用户的力量变化,感知用户的行走意图,它可以及时检测潜在的不稳定情况并提供支持,并且该方式成本效益高、非侵入性使用、对隐私保护较好,对用户行走的自然程度干扰小。然而,只使用运动信号作为智能助行器对人的感知手段存在局限性,因为它主要反映使用者与助行器接触点的直接交互,因此稳定的物理接触对准确捕捉用户的运动意图至关重要。但在助行器实际使用过程中很难保证稳定接触。由于不同用户施加的力量特征存在显著差异,助行器可能需要针对每个用户进行个性化校准,这不仅增加了使用复杂度,也限制了设备的通用性和便利性。
1.2 基于力学交互的人体运动干预
在助行器使用中,对使用者行为进行实时反馈也是确保用户安全舒适行动的重要手段之一,通过声音提示、视觉指示、力学接触等反馈机制可引导或干预使用者下一步的行为模式。
阻抗/导纳控制方法是通过改变设备对用户施加的力的大小和方向来引导用户行动。阻抗控制方法可通过调整助行器的助力和阻力来实现安全控制。这种控制方法的优势在于它能够模拟人类的助力感觉,为用户提供直观且自然的交互体验。导纳控制则侧重于调整设备的动态响应特性,以适应用户的运动模式。
触觉交互也是常用的干预方式之一,通过振动等方式提醒用户注意他们的行为,同时尽力避免过多的力学介入,以免影响用户的自主性。这种方式可以有效保护存在一定认知障碍的用户。
近年来,用户意图预测技术等进步使得助行器能够个性化学习用户的行为模式,并预测他们下一步需求,从而设计更高级的干预和引导策略,实现更智能化的共享控制。
2
智能助行系统基于视觉信号的人机交互
基于视觉信号的人体运动感知系统在智能助行器中有多方面的应用,不仅可以捕捉使用者的运动参数,更可以取得周围环境的图像和深度数据,并通过计算机视觉技术和机器学习算法进行图像处理和分析,使助行器能够识别和理解用户与周围的环境。
2.1 基于传统视觉信号的人体运动感知
在助行器上使用传统的机器视觉传感器已发展多年,Wasson等设计的智能助行机器人MARC Robotic Walker可根据声呐、红外传感器等信息结合用户的命令来推测用户的行走意图,是最早采用视觉信号预测行走意图的助行器之一。Moreira团队于2019年研制了ASBgo助行器,其底部布置了深度相机和激光测距传感器,可获取脚位置和方向的信息,用于步态分析与监测,还额外使用了红外传感器检测用户摔倒风险。类似的还有哥伦比亚Sierra团队设计的AGoRA智能助行器(图4),搭载了红外传感器、相机和激光雷达,用于检测追踪使用者。Ragaja等研制了一种后路主动助行器,如图5 所示,通过后置与用户骨盆高度齐平的红外传感器阵列检测人体躯干与前进方向的夹角,从而识别使用者的迈步动作与转向动作。

图4 AGoRA助行器
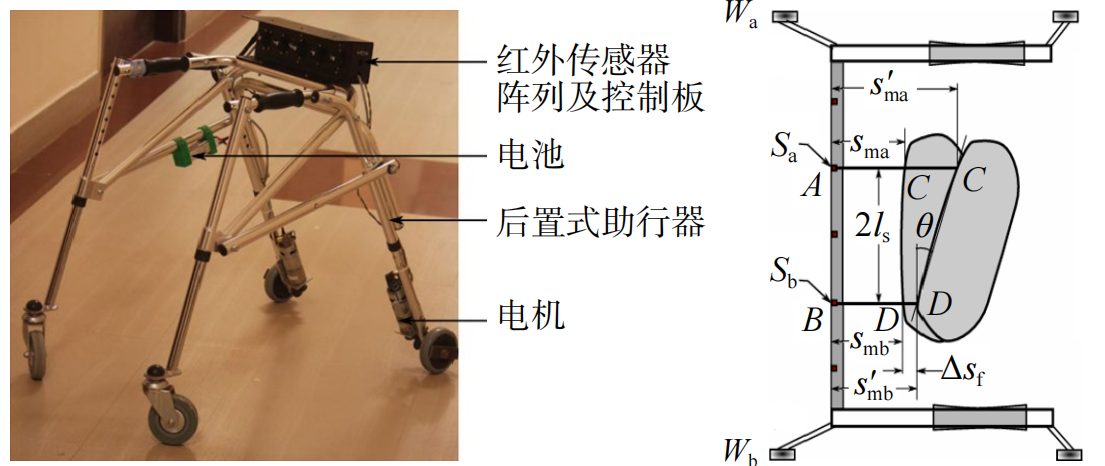
图5 后路主动助行器
使用光学传感器技术可以提供除力接触以外的人体姿态检测方式,弥补了力接触潜在的稳定性不足的问题,并且丰富的传感方式也可以更全面地描述使用者的行走特征,为医师进行康复指导提供更多帮助,因此被越来越多地应用于助行系统中。然而,步行习惯和步态障碍程度因人而异,现有方法不能充分适配个体差异,导致个性化不足,难以为不同患者提供更科学的辅助。
2.2 基于深度学习采用视觉信号的人体运动感知
一方面,基于图像处理的姿态识别和预测经过多年的发展已经足够成熟,有相当多的相关成果;另一方面,深度学习方法已经可以稳定地从RGB−D图像或视频中解析出人类动作识别以及人类动作预测。
目前支持基于视觉的人体姿态识别的便携硬件是以Microsoft Kinect、Intel RealSense和Orbbec Astra等为代表的深度摄像头,它们能够提供丰富的3D信息,适合实时人体姿态捕捉。
姿态估计和姿态预测在智能助行器上已有大量实践。如为比较不同算法处理RGB−D视频序列的效果,Gonçalves等研究了3种不同的基于深度学习的算法,分别使用了改造过的VGG16模型(图6(a))、结合通道级注意力的CNN模型(图6(b))、适用于单帧分类的UNET模型(图6(c))。
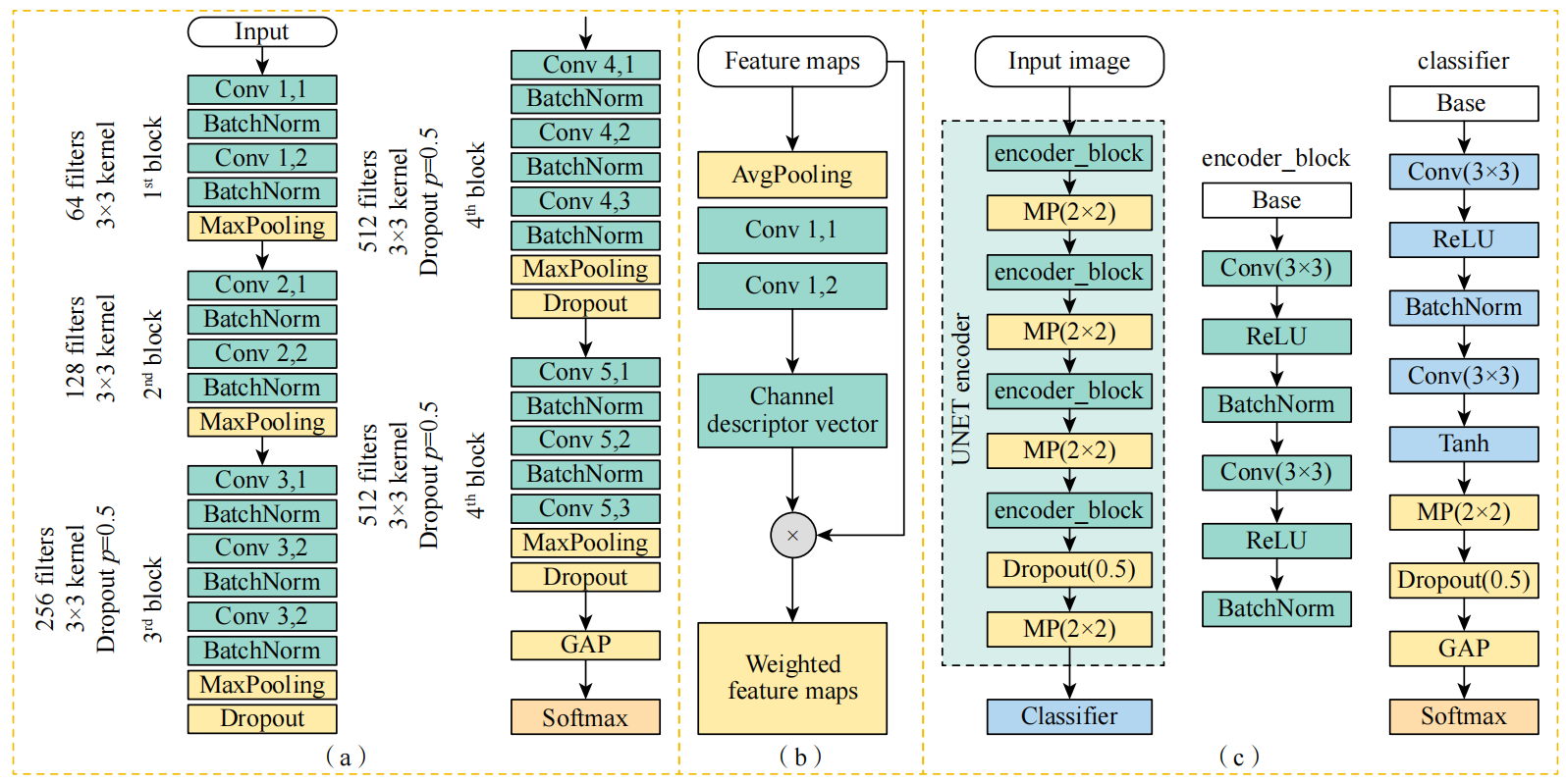
图6 Gonçalves团队使用的算法
很多其他团队也在相关研究方面做出贡献。如Wang等于2024年研制了WHUME系统,它采用了一个单目摄像头,结合了4个附加在前臂和大腿上的IMU惯性测量单元构成多模态感知体系,采用了4个单轴力传感器和一对压力鞋垫分别捕获手和脚的支持力,如图7所示。该方案结合了力学信号和视觉信号的优势,采用了非常轻量化的单目摄像头,是一种较为先进的多模态感知方案。
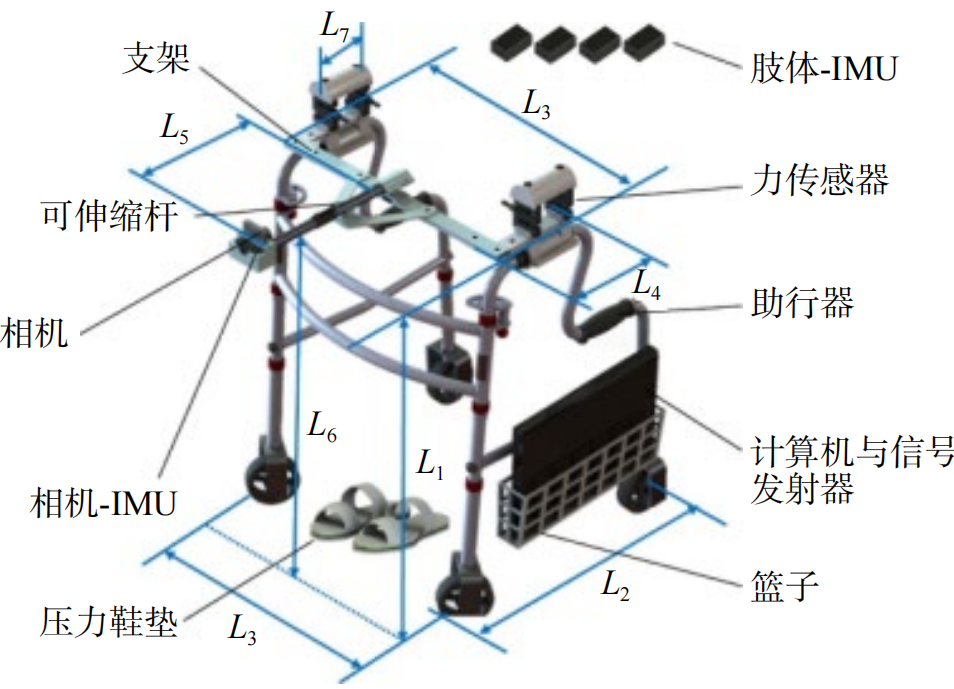
图7 WHUME系统
深度学习驱动的姿态识别技术正推动智能助行器向精准、个性化辅助迈进。未来随着相关技术的不断进步,如算法持续轻量化以适应移动平台,深度融合多模态传感器提升鲁棒性,并基于精准感知实现用户意图理解与更智能、主动的个性化干预,将为患者提供更加人性化的行走支持。
2.3 基于视觉对环境的识别及避障规划
助行器的环境识别技术是辅助视觉受损或行动不便人士进行导航和避障的关键。为了保证安全避免碰撞,通常采取视觉的方式对环境信息进行收集。
早期的智能助行器采用了传统的环境检测方式。近年来,智能助行器的环境识别借鉴了自动驾驶的有关技术,通常通过摄像头捕捉周围环境的图像,以及使用激光雷达创建周围环境的精确三维地图。每种算法都有其特定的应用场景和优缺点。如Lima等提出了一种改进版本的概率泡沫法,以应用于动态环境中智能机器人助行器的路径规划,设备及实验场景如图8所示。实验结果表示该算法可在静态障碍物中规划路径指引用户前往目的地,同时规避与路径交叉的其他移动障碍物。
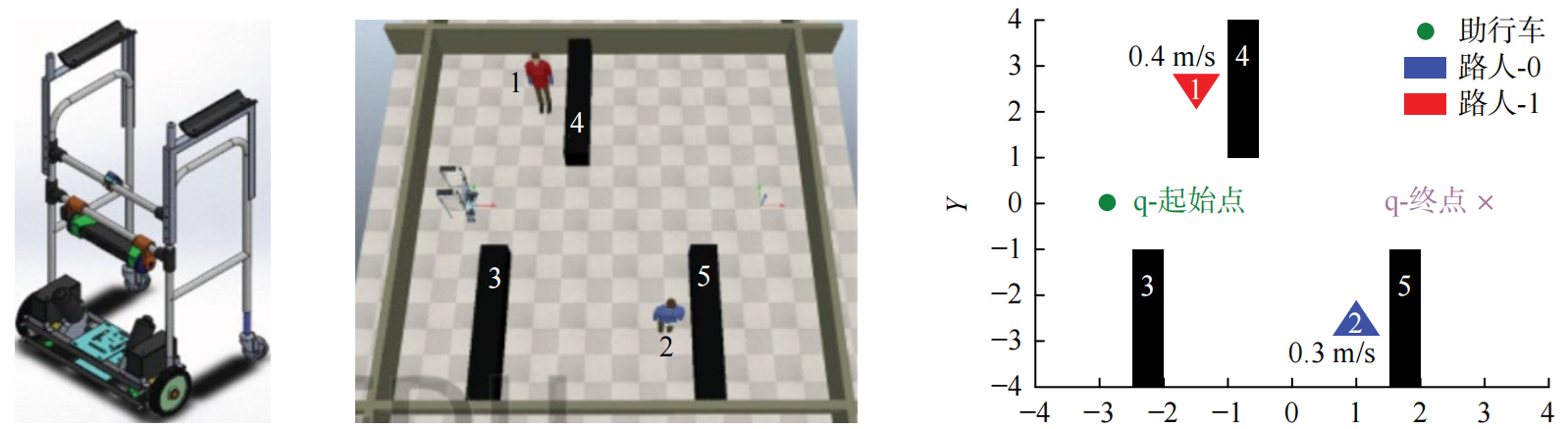
图8 改进概率泡沫算法在动态环境中的实验场景与设备部署
尽管目前助行器的环境识别技术借鉴了较为成熟的自动驾驶技术,但由于其独特性,仍存在很多问题,在动态和复杂的环境中,如拥挤的街道或多变的天气条件下,保持准确的环境识别仍然较为困难。而另一个技术挑战是如何将多种传感器和计算单元集成到助行器这样一个小型设备中,同时保持其性能和成本效益。不同失能情况的用户有不同的导航和避障需求,因此个性化导航辅助也是潜在的研究方向。
3
智能助行系统其他方式的人机交互
3.1 基于生理信号的人机交互
基于生理信号的感知技术在人机交互、医疗健康监测以及运动状态分析等领域发挥着重要的作用。这类技术主要通过各种侵入式和非侵入式的生理电信号采集装置来实现,例如利用MEMS微针阵列或干电极等设备来捕捉人体产生的生理电信号。
在这些生理电信号中,EEG信号因其能够反映大脑皮层的电活动而被广泛应用于脑机接口系统。EMG信号则因其与肌肉活动直接相关,被广泛用于运动和康复领域。常规生理信号也已被应用于助行系统中,一般用来检测用户的健康状况,以便需要时提供警报或记录每日健康状态。Sanyod等的助行系统与多个传感器连接,如图9所示。这种设计可以提供对用户更好的移动应用程序,并在需要时向护理人员发送警报。
基于生理信号的感知技术正快速发展,其在运动状态监测、人机交互以及医疗健康等领域的应用前景广阔。随着新材料、新算法的不断涌现,未来这一技术有望实现更加准确、实时、无创的生理电信号采集和解析,为人类生活带来更多便利。
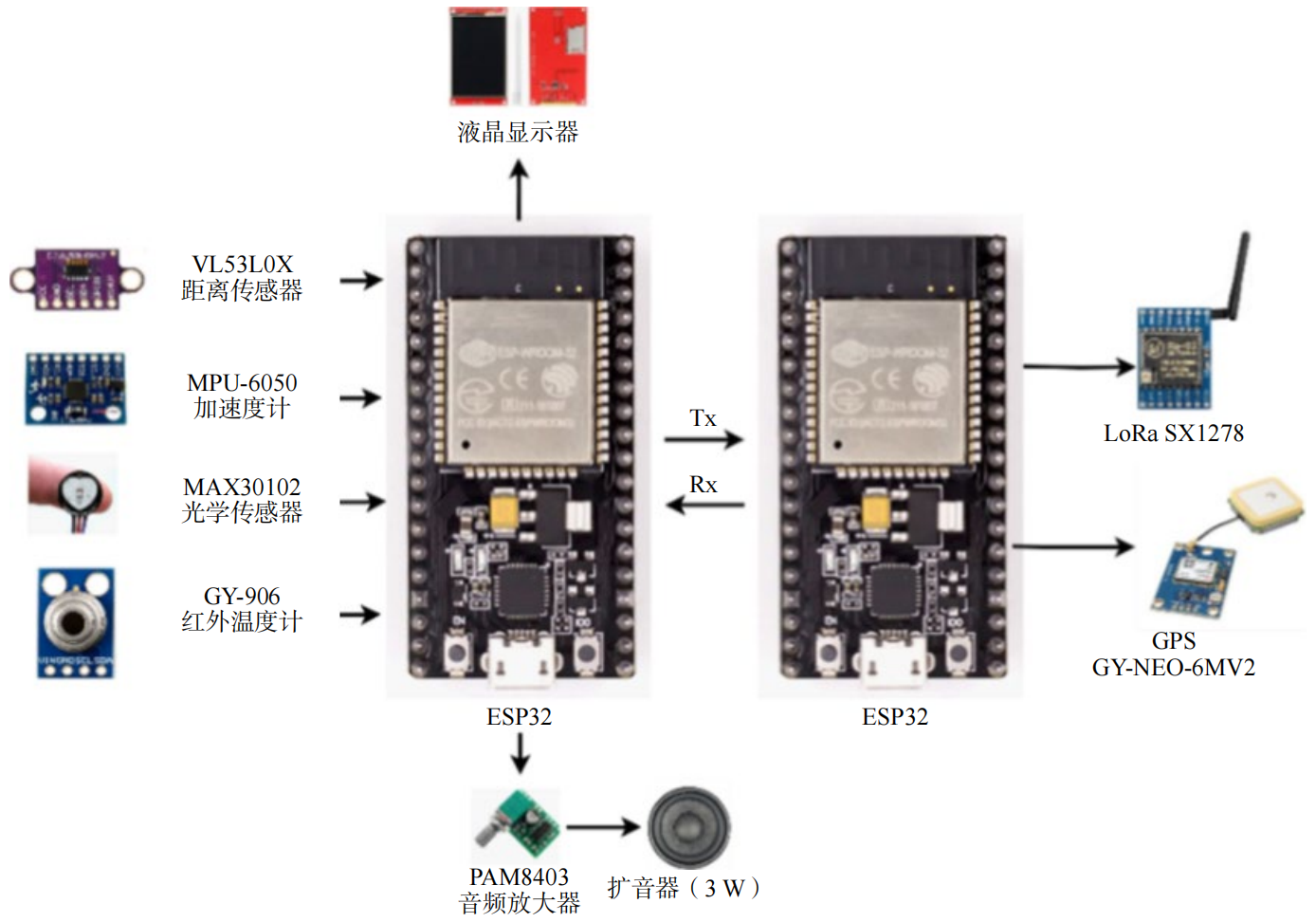
图9 Sanyod等提出的多传感器健康监测助行系统架构
3.2 结合虚拟现实的人机交互
近年来,虚拟现实技术(VR)已被越来越多地与助行系统结合起来使用,以求为用户提供安全保障与康复训练。如Franchine等的研究证明,使用虚拟现实技术可以有效提高用户尤其是有认知障碍的用户的训练积极性,改善人机交互的结果,实验设备及场景如图10所示。但现阶段,依托虚拟现实的智能助行器人机交互相关研究仍处在实验室探索阶段。
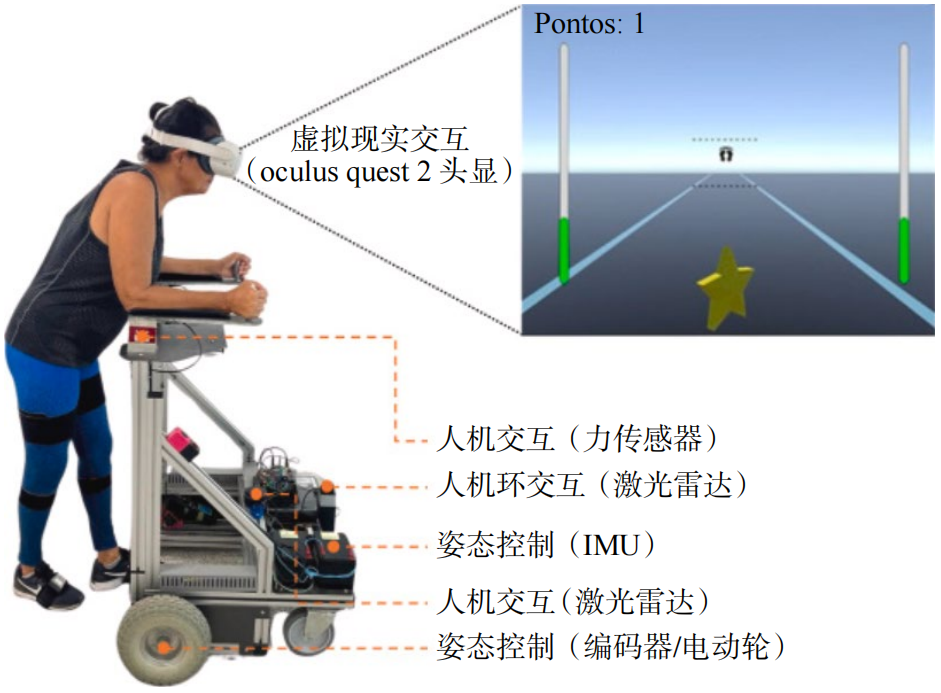
图10 UFES vWalker及其子系统
发展至今,单一的交互方式已难以满足用户在安全性、舒适性方面越来越高的需求,因此智能助行器正在向应用多模态融合的交互和自适应交互等技术的方向发展。多模态交互结合了多种感官通道,以实现更自然、更丰富的交互体验。自适应交互则能够根据用户的特定能力和需求动态调整处理多种交互方式捕获的信息。
4
结论
在全球人口老龄化加剧以及残障人士和运动障碍患者数量不断增加的背景下,智能助行器作为提升行动能力和生活质量的关键辅助设备,其研究与开发受到了学术界和工业界的广泛关注。随着技术的不断进步,智能助行器已从最初的基础机械支撑设备转变为高度智能化、自适应化的先进辅助系统。现代智能助行器通过集成先进的传感器、控制系统和人工智能算法,能够实时监测用户的步态和姿态,自动调整支撑力度,并提供步态指导。
然而,尽管智能助行器在实验室环境中取得了诸多进展,其大规模市场应用仍面临诸多挑战,整体仍处于发展阶段。未来的研究应聚焦于以下4个方面:
(1)进一步优化运动意图识别与预测算法,提升系统的实时性和准确性;
(2)开发适应复杂环境的导航与避障策略,满足不同用户群体的需求;
(3)加强交互安全性的研究,确保设备在复杂场景下的可靠性和用户安全性;
(4)推动多模态融合交互技术的发展,提升用户体验和系统适应性。
未来有望实现意图识别更加准确、人−机−环协同程度更高、安全策略和应对措施更精准的智能助行器,为老年人、残疾人等群体提供更优质、更舒适的康复辅助体验,助力其实现独立自主生活的目标。
本文作者:王瀚升、张艳瑜、郭江真、陶春静、樊瑜波
作者简介:王瀚升,北京航空航天大学医学科学与工程学院、北京市生物医学工程高精尖创新中心,博士研究生,研究方向为智能助行辅具;陶春静(通信作者),北京航空航天大学医学科学与工程学院、北京市生物医学工程高精尖创新中心,教授,研究方向为智能康复;樊瑜波(共同通信作者),北京航空航天大学医学科学与工程学院、北京市生物医学工程高精尖创新中心,教授,研究方向为生物力学。





 下载app
下载app