问题分诊室
【校企紧握手】专题系列活动高端装备专场—高校科研成果展示(十五)
发布时间: 2023-06-19
为深入学习贯彻党的二十大精神,全面落实习近平总书记对天津工作“三个着力”重要要求和系列重要指示批示精神,深入实施“科教兴市人才强市行动方案”,落实制造业立市部署,努力搭建校企合作新局面,全力推进产教融合、科教融汇,市教育两委会同市工信局、市科技局、市知识产权局、武清区人民政府,联合“政产学研金介服”等各相关单位,召开“校企紧握手”专题系列活动之天津市高校科技成果发布暨校企对接会。协同创新,让更多高校科技成果转化为现实生产力,推动天津产业高质量发展。同时我们也将高校项目成果进行持续的线上联展和对接,本次带来的是天津大学的优质项目。
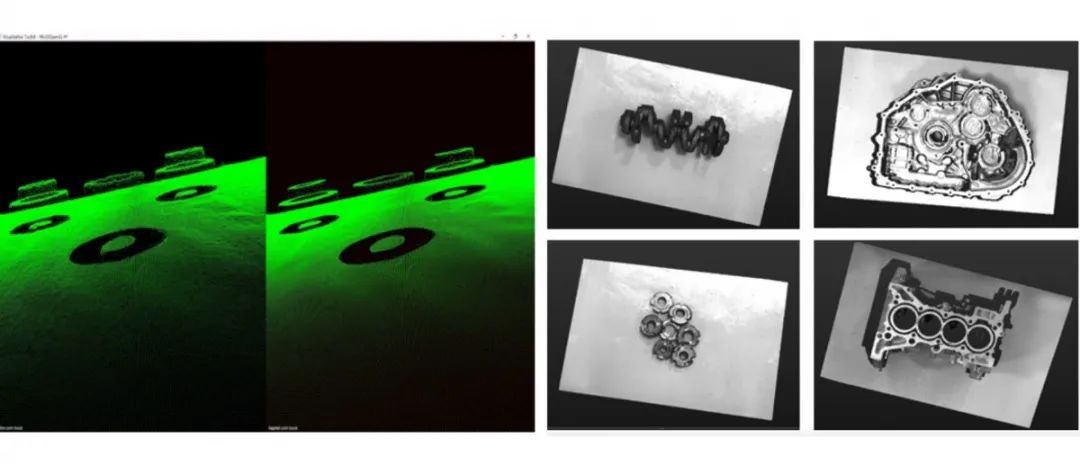
01基于3D视觉的无序抓取关键技术
相比较于国产机器人的日渐成熟,3D传感器及无序抓取关键技术仍然是国内的一个研究难点和热点。工业机器人是中国乃至全球制造业发展的重要支撑,而3D视觉作为工业机器人之眼,对工业机器人的行业应用前景产生深远影响。3D相机能够实时的“看到”工件所处的位置以及姿态,自动判断得到下一个抓取的工件信息。机械臂系统根据3D相机的分析结果,自动规划路径并同时避开障碍物实现对工件的抓取。
该成果包括3D视觉的无序抓取关键技术,包括3D传感器构建方法、三维立体匹配技术、多目伺服技术、三维点云重建技术、即时定位与地图构建技术(SLAM)、视图合成技术、无序分拣抓取规划技术、机器人抓取避障算法等。此外,该成果还包括基于上述技术的基础软件开发平台,可针对具体需求进行快速开发。
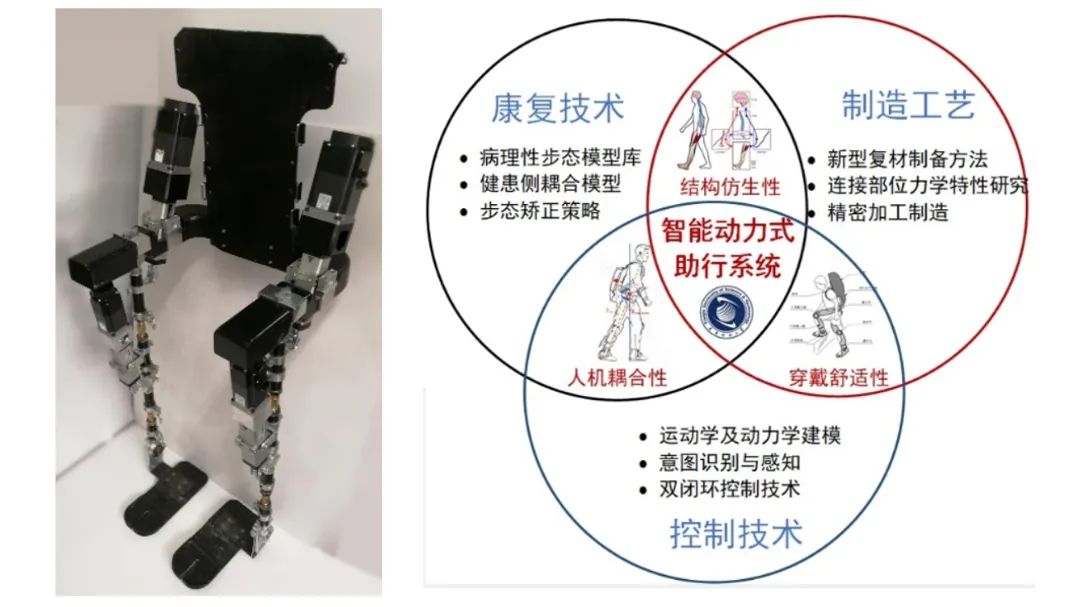
02智能仿生动力式助行器
康复助行器是国际康复领域认为能够辅助甚至取代医师帮助患者进行康复训练的关键器械,其应用将真正缓解康复医师缺乏,医疗资源分配不均的现状,提升人民的幸福指数。
在国家自然科学基金项目《基于滑跌事故预测模型的助行器行走稳定性研究》的支持下,团队开始了助行器的设计与研发;之后在天津市科技支撑计划资助项目《智能仿生动力式助行器的研制》的支持下,开发出智能动力式助行器样机,授权发明专利3项,获得天津市科技进步二等奖。
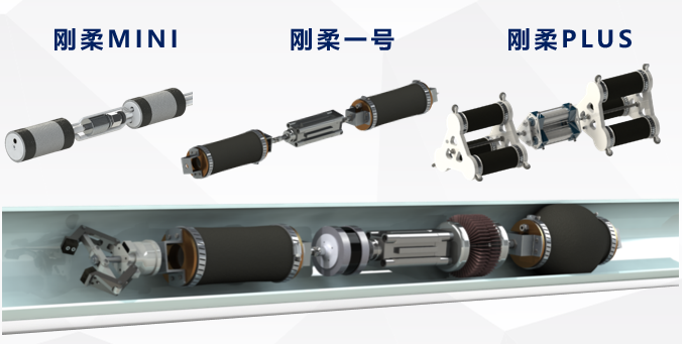
03多模态智能柔性管道机器人系统
致力于解决中小型管道维护问题,为用户提供多元化的管道维护设备及解决方案,团队自主研发三款柔性管道机器人,采用气压驱动、多模态功能集成、刚柔混合装置、智能仿生控制算法等核心技术,让管内作业更加安全、高效、便捷。团队还配套研发了多尺度感知柔性气囊系统和模块搭载系统,极大地拓宽了产品的应用场景,让管道内部防爆难、监测难等问题迎刃而解。这套可应用于多场景,高效率,易操作的管内作业系统能够大大降低管道维护门槛,提高管道维护效率,助力智能管网的发展建设。
目前,项目与国防科技大学,哈工大机器人研究院建立了良好的合作关系,受到德国慕尼黑工业大学、英国曼彻斯特大学、中科院自动化研究所等国内外顶尖机器人专家的推荐。现已发表管道机器人相关领域高水平论文11篇,拥有发明专利3项、实用新型专利2项。项目获得2022年中国国际“互联网+”大学生创新创业大赛银奖,2021年中美青年创客大赛国际一等奖,第十七届“挑战杯”全国大学生科技作品竞赛全国一等奖等辉煌成绩。
对于高校项目有对接需求的企业可以与协会联系,同时“校企紧握手”专题系列活动天津市高校科技成果发布暨校企对接会欢迎各位企业家以及高校院所的专家报名参加,携手共建、共创、共享校企紧握手平台。
转载自天津市高新技术企业协会
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20





 下载app
下载app