ACC纵向控制
发布时间:
2022-03-01
来源:
科创问题库
截止日期:2022-03-03
价格 10万
地区: 北京市 市辖区 大兴区
需求方: 国汽***公司
行业领域
其他
需求背景
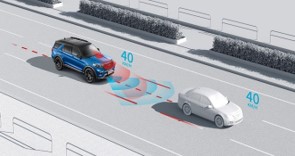
本任务基于VTD仿真环境进行L2级车辆纵向控制(模拟全速ACC功能),评价车辆在前方无车定速巡航场景、跟车场景、跟随前车停车与起步场景、前车减速行驶场景等4类场景下的控制性能,样例如图1所示。此外,本任务要求在不提供车道线信息条件下,能够保持合理的车间时距。
需解决的主要技术难题
1、L2级车辆纵向控制,模拟全速ACC功能
2、不提供车道线信息条件下,能够保持合理的车间时距
期望实现的主要技术目标
(1)测试场景
车辆纵向控制评价场景分为前方无车定速巡航场景、跟车场景、跟随前车停车与起步场景、前车减速行驶场景。
1)前方无车定速巡航场景:自车在平坦道路上以30、60、80、100、120km/h的速度分别进行定速巡航行驶;
2)跟车场景:自车设定车速120km/h,目标车分别以30、60、80、100km/h定速行驶,自车跟随目标车至稳定跟车行驶状态,然后调节跟车模式;
3)跟随前车停车与起步场景:本车行驶速度100km/h,目标车初始车速分别以40、60、80km/h的速度行驶,稳定跟车后目标车以减速度4m/s²减速至速度为0,本车跟随目标车减速停车。跟停后,目标车立即以全油门加速至原速度行驶,本车跟随起步行驶;
4)前车减速行驶场景:①本车分别以30、60km/h车速行驶接近静止目标车;②本车分别以80、100、120km/h的较高车速行驶,接近低速30km/h行驶的目标车;③本车分别以120、100、80km/h车速接近目标车,目标车车速80km/h,进入稳定跟车状态后,目标车速度80km/h减至0,减速度分别取-3、-4m/s²,本车跟随减速。
(2)测评指标
1)前方无车定速巡航场景
① 速度稳定后实车车速与巡航速度的差异不大于1km/h,得分100;
② 速度稳定后实车车速与巡航速度的差异大于1km/h,不大于3km/h,得分60;
③ 速度不能保持稳定,或者速度稳定后实车车速与巡航速度的差异大于3km/h,得分0。
④ 其余得分按照差值处理。
2)跟车场景
① 车辆在全速域内,应满足:自车行驶速度≤18km/h时,最大加速度值≤4m/s²、最大减速度值≤5m/s2、最大减速度变化率≤5m/s³;自车行驶速度≧72km/h时,最大加速度值≤2m/s²、最大减速度值≤3.5m/s2、最大减速度变化率≤2.5m/s³;自车行驶速度在18km/h至72km/h区间时,最大加速度值为 2-4m/s2之间插值、最大减速度值为3.5-5m/s2之间插值、最大减速度变化率为2.5-5m/s³之间插值。
② 稳定跟车时,跟车车间时距范围在1-2s;且在靠近目标车过程中,满足上述①的指标要求,得分100;
② 稳定跟车时,跟车车间时距范围不在1-2s内;且在靠近目标车过程中,满足上述①的指标要求,得分60;
③ 未稳定跟车,或在靠近目标车过程中,不满足上述①的指标要求,得分0。
④ 其余得分按照差值处理。
3)跟随前车停车与起步
① 能够跟随前车停止且跟停减速度最大值≤4m/s²,能够成功跟车起步且加速过程中加速度最大值≤3m/s²,得分100;
② 能够跟随前车停止并成功跟车起步,但不满足上述①的指标要求,得分60;
③ 未跟车停车,发生碰撞,或跟车起步失败,得分0;
④ 其余得分按照差值处理。
4)减速场景
① 车辆在全速域内,应满足:自车行驶速度≤18km/h时,最大加速度值≤4m/s²、最大减速度值≤5m/s2、最大减速度变化率≤5m/s³;自车行驶速度≧72km/h时,最大加速度值≤2m/s²、最大减速度值≤3.5m/s2、最大减速度变化率≤2.5m/s³;自车行驶速度在18km/h至72km/h区间时,最大加速度值为 2-4m/s2之间插值、最大减速度值为3.5-5m/s2之间插值、最大减速度变化率为2.5-5m/s³之间插值。
② 未发生碰撞,且减速度满足上述①的要求,得分100;
③ 未发生碰撞,但减速度不满足上述①的要求,得分60;
④ 发生碰撞,得分0;
⑤ 其余得分按照差值处理。
处理进度
-
提交需求2022-03-01 16:22:25
-
确认需求2022-03-03 17:42:58
-
需求服务
-
需求签约
-
需求完成
 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号