一种火灾现场消防员应急救助系统
发布时间: 2022-06-23
来源: 科创项目库
基本信息
合作方式:
技术转让
成果类型:
实用新型专利
行业领域:
新一代信息技术产业,信息传输、软件和信息技术服务业
成果介绍
说 明 书
一种火灾现场消防员应急救助系统
技术领域
本实用新型涉及一种火灾现场消防员应急救助系统。
背景技术
目前,消防员与外界联络的手段就是通过话音对讲机,通过对讲将火灾现场的环境 情况与自身的位置告诉外面的指挥人员,进入火场时防护装置主要还是依靠一种自给开 放式空呼吸器。空气呼吸器优点是:采用开放式结构,呼出气体直接排入大气环境,又 由于供气流量大,佩戴者呼吸感觉比较舒畅,使外界有害气体无法侵入佩戴者的呼吸器 官,使用安全系数高;可以反复充气使用,使用成本比较低。其主要缺点是:使用时间 较短,一般为1小时左右,无法正确了解消防员情况,相互之间的联络主要还是依靠对 讲机,通过对讲将火灾现场的环境情况与自身的位置告诉外面的指挥人员。
但是,随着无线电子技术的发展,特别是无线传感器网络的应用,使得消防人员与 外界的联络增加一种有力的手段成为可能。然而在消防现场中,只对周围小范围环境的 信息进行监测和采集是不够的,需要监测所在网络范围内的各种数据信息,但任何数据 在没有地理位置的前提下是完全没有意义的,因此,网络中节点的位置信息对这些监测 活动至关重要。发生灾难时,环境监测可以起到掌控灾难现场情况的作用,但是在施救 过程中的人员安全却是需要考虑的重中之重,因此,对于消防现场环境下的无线传感器 网络定位技术的研究是非常有意义的。目前,常用的定位技术包括超声波、射频信号、 红外线等,但它们都不适合用于室内定位系统。超声波信号受多径效应和非视距传播影 响很大,非常不适合用于室内环境;红外线只适合短距离传播,而且易被室内或室外其 他光线所干扰,造成很大测距误差,因此,在室内精确定位上有很大局限性。
实用新型内容
本发明所要解决的技术问题是针对上述现有技术提供一种在紧急情况下架设在现 场周围,不需要事先布置的、能实时监控消防员周围情况的火灾现场消防员应急救助系 统。
本发明解决上述技术问题所采用的技术方案为:一种火灾现场消防员三维定位应急 救助系统,其特征在于包括:佩戴于消防员身上的移动标签,架设在火灾现场周围的位 置固定的基站,及与基站连接的监控终端;其中移动标签通过无线网络与基站连接,基 站用于接收从标签发送来的数据并将该数据转发给监控终端,监控终端对基站发来的数 据进行处理;所述移动标签上配置有测量环境参数的传感器模块,该移动标签在规定时 限内定时将包含位置信息与环境信息的数据包通过基站发送给监控终端,监控终端对基 站输出的数据包进行滤波处理与修正,计算移动标签的准确坐标,并通过图形界面实时 显示出当前时刻基站与移动标签的三维位置,以及移动标签所处环境信息。
所述基站的个数可以为多个,各基站的高度可以处于同一个水平面,也可以不在同 一个水平面上。
所述传感器模块还温度传感器和二氧化碳浓度传感器。
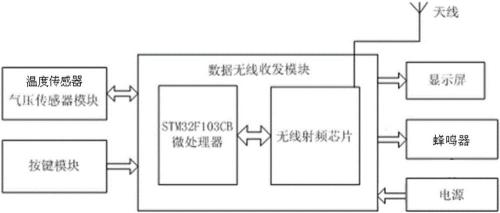
所述移动标签的硬件结构包含有无线数据收发模块、显示屏、蜂鸣器、电源、天线、 传感器模块和按键模块,传感器模块、按键模块、显示屏、蜂鸣器、电源、天线均与无 线数据收发模块连接,无线数据收发模块包含微处理器和与微处理器连接的无线射频芯 片;基站的硬件结构与移动标签的硬件结构相同。
与现有技术相比,本发明的优点在于:整个系统是在紧急情况(如火灾)下架设 在现场周围,不需要事先布置,节省建筑建设成本;消防员佩带的移动标签上配置气压 传感器,监控终端可以通过传感器模块测量的数据,动态了解消防员当前情况。
附图说明
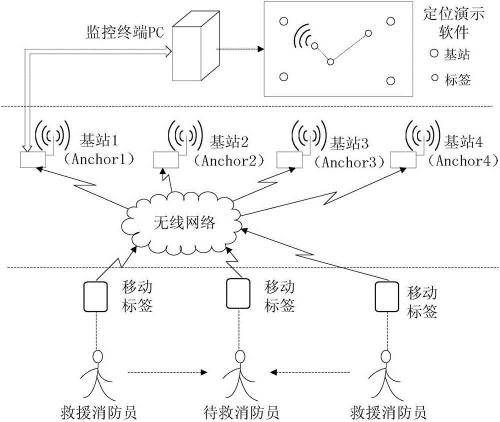
图1为本发明试试例中火灾现场消防员应急救助系统框图。
图2为本发明试试例中移动标签的硬件结构图。
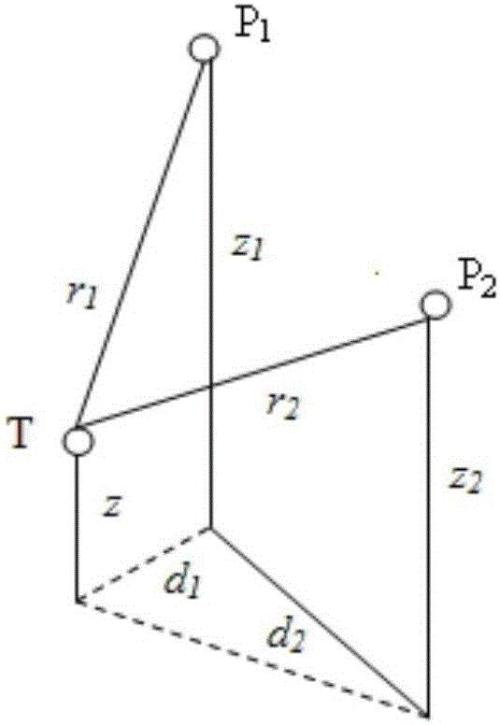
图3为本发明试试例中二基站式三维定位示意图。
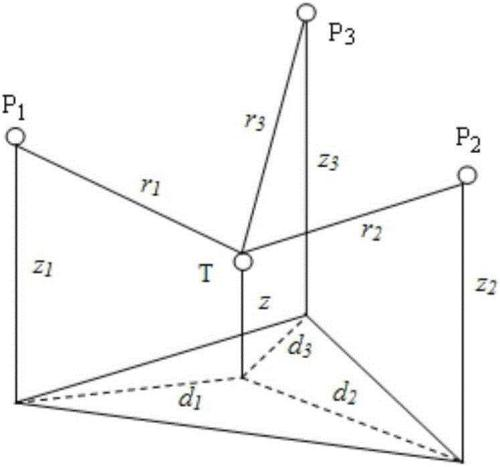
图4为本发明试试例中三基站式三维定位的示意图。
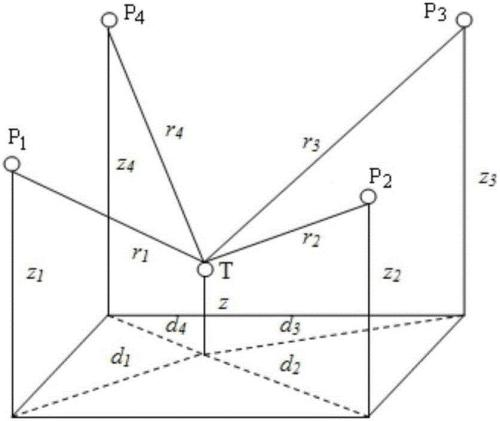
图5为本发明试试例中四基站式三维定位的示意图。
具体实施方式
以下结合附图实施例对本发明作进一步详细描述。
一种火灾现场消防员应急救助系统,包括:佩戴于消防员身上的移动标签,架设在 火灾现场周围的位置固定的基站,及与基站连接的监控终端,参见图1所示。
其中,移动标签是整个系统的最底层,移动标签上配置有测量环境参数的传感器模 块,传感器模块包含有气压传感器、温度传感器和二氧化碳浓度传感器,负责测量与各 个固定基站之间的距离、采集环境参数,如气压、温度、二氧化碳浓度等,并以广播包 的形式将定位数据包发送给各个基站,移动标签安装在消防员身上,并在规定时限内定 时将位置信息与环境信息通过基站发送到监控终端,实现对消防员进行实时定位。所述 移动标签的硬件结构包含有无线数据收发模块、显示屏、蜂鸣器、电源、天线、传感器 模块和按键模块,传感器模块、按键模块、显示屏、蜂鸣器、电源、天线均与无线数据 收发模块连接,无线数据收发模块包含微处理器和与微处理器连接的无线射频芯片,参 见图2所示;在特殊情况下(即二次救援模式),监控终端将移动标签分成待救标签与 救援标签,在救灾过程中一旦发现消防队员出现危险,即当某一个移动标签发来的环境 信息超出预设的安全范畴时,需要指挥其他队员给予急救,此时,可以通过无线网络将 该队员佩带的移动标签设置成待救标签,同时把其余移动标签发来的环境信息没有超出 预设的安全范畴的,将其设为救援标签,在二次救援模式下,监控终端实时监控救援标 签与待救标签之间的距离,当救援标签与待救标签之间的距离小于某一门限值时发出警 报,越靠近警报频率越高,以便在现场因浓烟无法看清的情况下提醒二次救援队员。
基站的位置是固定不变的,可以看成是已知坐标的定位节点,它用于接收从移动标 签发送来的包含位置信息的数据包,其中一个基站与监控终端相连,输出接收到的数据 给监控终端,基站的硬件结构与移动标签相同。基站的数量依照救灾现场实际情况应急 设置而定,可以为1个、2个、3个、4个或更多个,一般将基站临时安装在救灾现场(如 大楼、仓库等)的周围,并根据基站的位置设定其坐标。
监控终端的作用是接收各移动标签发送来的位置信息与环境信息,并对基站输出的 数据进行滤波处理与修正;计算移动标签的准确坐标,并通过图形界面实时显示出当前 时刻基站与移动标签的三维位置,以及移动标签所处环境信息,并计算救援标签与待救 标签之间的距离,通过基站将该距离值发送给救援标签。
而监控终端通过如下方式计算移动标签的准确坐标:
首先采用基于CSS技术的无线测距方法测量基站与移动标签之间的距离;基于CSS 技术的无线测距方法为现有常规技术;
然后移动标签通过气压传感器测量的数据计算移动标签相对于地平面的高度;本实 施例中,气压传感器测量采用型号为BMP085,该型号为BMP085的气压传感器BMP085 是德国BOSCH公司生产的一款低功耗、高精度的MEMS数字气压传感器,其供电电压 为1.8~3.6V,典型值为2.5V,它由电阻式气压传感器、A/D转换器和带有E2PROM的 控制单元组成,控制单元通过I2C总线与移动标签的微处理器连接,移动标签的微处理 器采用型号为STM32F103CB微处理器,该微处理器根据型号为BMP085的气压传感器 输出的参数对移动标签相对应地平面的高度进行实际的测算,而具体测算方法为现有常 规技术;
然后,监控终端根据基站与移动标签之间的距离、基站自身相对于地平面的高度以 及移动标签相对于地平面的高度,通过几何计算,得出移动标签的准确坐标。这里几何 计算也是常规技术。
假设zi为基站i(i∈[1,N],其中N为基站总数)到地面的高度,即基站i的z坐标 值,当基站固定后,zi为已知参数;知道了基站自身相对于地平面的高度以及移动标签 相对于地平面的高度,通过气压-高度转换得到移动标签与基站i的海拔高度,分别用h、 hi表示,则移动标签的z坐标的计算公式如下:
z=|h-hi|+zi
由于各基站并不严格地处于同一水平面,因此需要将基站及移动标签都投影到水平 面,在此记移动标签与基站i之间的距离为ri,则ri在地面的投影为:
<math> <mrow> <msub> <mi>d</mi> <mi>i</mi> </msub> <mo>=</mo> <msqrt> <mrow> <msup> <msub> <mi>r</mi> <mi>i</mi> </msub> <mn>2</mn> </msup> <mo>-</mo> <msup> <mrow> <mo>(</mo> <mrow> <msub> <mi>z</mi> <mi>i</mi> </msub> <mo>-</mo> <mi>z</mi> </mrow> <mo>)</mo> </mrow> <mn>2</mn> </msup> </mrow> </msqrt> </mrow> </math>
(1)当基站个数为2,即N=2时
在此情况下,基站部署时必须保证移动标签在两个基站连线的同一侧,如图3为二 基站式三维定位示意图,其中P1、P2为固定基站,其坐标为(xi,yi),(i=1,2);T为移动 标签,通过几何计算移动标签有两种可能的坐标,分别设为Ta、Tb,其坐标分别为(xta, yta)和(xtb,ytb)。
计算第一种可能的移动标签坐标,移动标签与基站P1之间的距离r1在地面的投影 d1与横坐标的夹角θ为:
其中α为d1和d2之间的夹角,根据余弦定理
<math> <mrow> <mi>α</mi> <mo>=</mo> <mi>arccos</mi> <mrow> <mo>(</mo> <mfrac> <mrow> <msubsup> <mi>d</mi> <mn>1</mn> <mn>2</mn> </msubsup> <mo>+</mo> <msubsup> <mi>d</mi> <mrow> <mn>1</mn> <mo>,</mo> <mn>2</mn> </mrow> <mn>2</mn> </msubsup> <mo>-</mo> <msubsup> <mi>d</mi> <mn>2</mn> <mn>2</mn> </msubsup> </mrow> <mrow> <mn>2</mn> <msub> <mi>d</mi> <mn>1</mn> </msub> <msub> <mi>d</mi> <mrow> <mn>1</mn> <mo>,</mo> <mn>2</mn> </mrow> </msub> </mrow> </mfrac> <mo>)</mo> </mrow> </mrow> </math>
而d1,2为夹角α对应的三角形边长,即为基站P1与基站P2之间的距离;
移动标签的纵坐标为:
yta=y1+d1sinθ
若x1<x2,则移动标签的横坐标为:
xta=x1+d1cosθ
若x1>x2,则移动标签的横坐标为:
xta=x1-d1cosθ
计算第二种可能的移动标签坐标,移动标签与基站P1之间的距离r1在地面的投影 d1与横坐标的夹角θ为:
移动标签的纵坐标为:
ytb=y1-d1sinθ
若x1<x2,则移动标签的横坐标为:
xtb=x1+d1cosθ
若x1>x2,则移动标签的横坐标为:
xtb=x1-d1cosθ
在两个基站实际部署时,事先知晓标签位于连线的侧位,因此,可以选取正确的坐 标值。
(2)当基站个数为3,即N=3时
图4为三基站式三维定位的示意图。将3个基站两两组合,共有3组,即:(P1,P2)、 (P1,P3)、(P2,P3)。每组2个基站,与移动标签构成类似于图3的情况。对于一个组,通 过上述(1)中N=2时的定位计算方法,可以得出两种可能的坐标(xta,yta)和(xtb,ytb)。然 后,分别计算这两个坐标与另外一个基站的距离,选取距离较短的点为移动标签坐标。 最后,将三组分别计算的移动标签坐标求平均值,即为移动标签的位置。
(3)基站个数为4,即N=4时
图5为四基站式三维定位的示意图。将4个基站两两组合,共有6组,即:(P1,P2)、 (P1,P3)、(P1,P4)、(P2,P3)、(P2,P4)、(P3,P4)。每组2个基站,与移动标签构成类似于图 3的情况。对于一个组,通过上述(1)N=2时的定位计算方法,可以得出两种可能的坐标 (xta,yta)和(xtb,ytb)。然后,分别计算这两个坐标与另外2个基站的距离之和,选取距 离之和较小的点为移动标签坐标。最后,将6组分别计算的标签坐标求平均值,即为移 动标签的位置。
说 明 书 附 图
成果亮点
团队介绍
成果资料

 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号