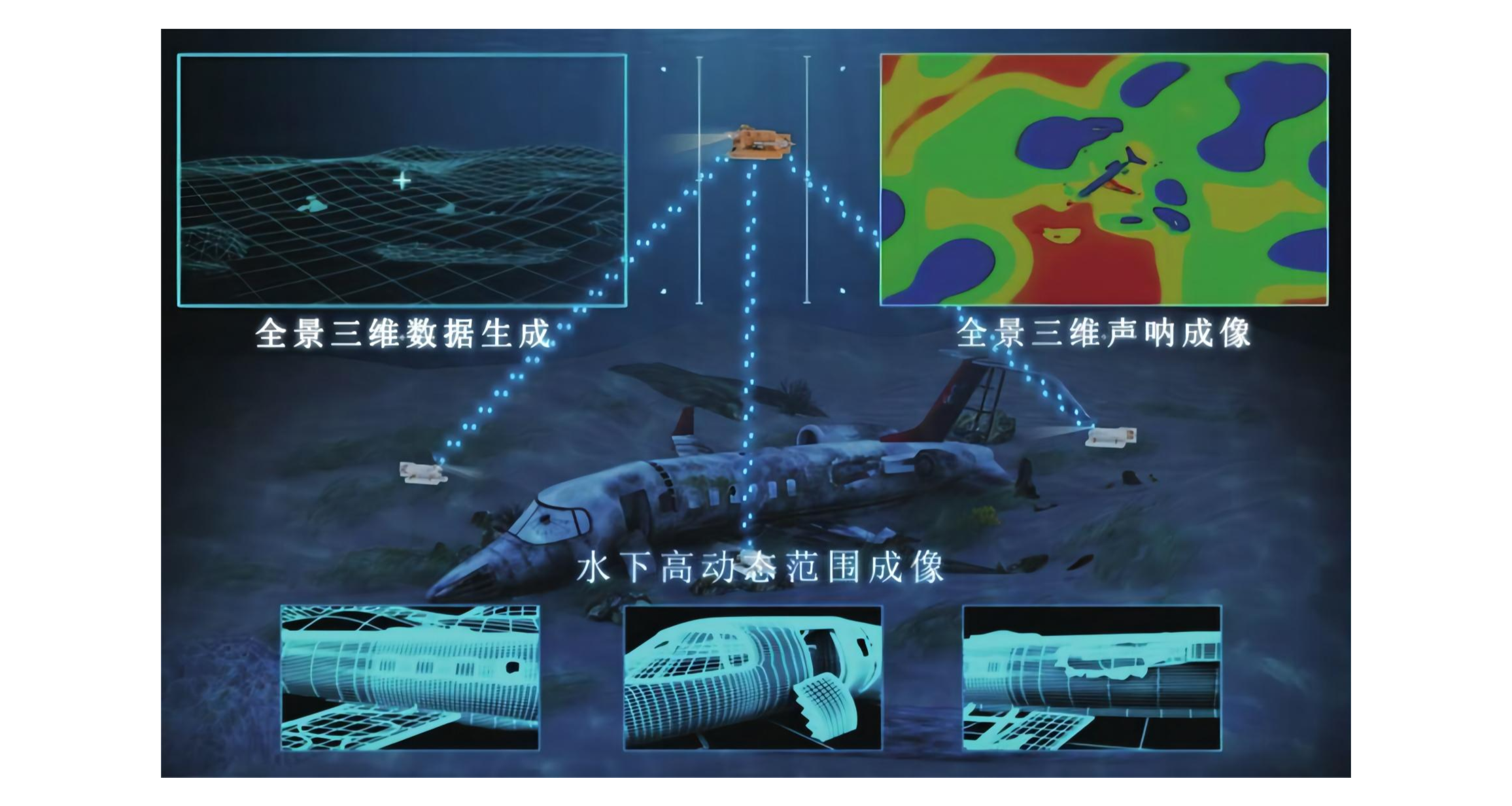
该技术采用“一主三从”的分布式异构感知系统架构设计。主感知系统实现水下场景大尺度粗粒度的感知,三个从感知系统采取小型化轻量化的设计,分别以125°的大视场角针对水下复杂目标物凸包数据进行一次性高效精细化立体视觉测量。系统技术方案是以分布式的声呐和双目视觉混合系统为感知源,实现极低照度光照条件下仍可以高速成像的高动态范围高清图像传感器芯片,构建能够适应环境和网络拓扑动态变化的路由算法,提高网络的性能并扩展通信范围和覆盖范围。本成果能够实现多个用户高效、合理地共享有限的水下无线光信道资源的MAC协议,解决由光束指向性与节点移动性带来的邻居发现与邻居跟踪问题,完成主从多点协同的水下高精度立体视觉测量,建立高效数据访问策略以实现大尺度水下全景三维数据生成。


 下载app
下载app