点赞
基于生物电信号控制的低速自动驾驶智能轮椅构建方法
发布时间:2022-05-06
基本信息
- 合作方式: 技术服务
- 成果类型:
价格
双方协商
行业领域
其他
成果描述
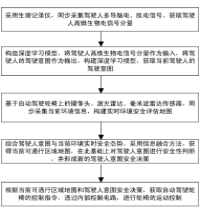
本发明公开了一种基于生物电信号控制的低速自动驾驶智能轮椅构建方法,其特征在于,包括如下步骤:利用生理记录仪,同步采集驾驶人多导脑电、肌电信号,获取驾驶人高维生物电信号分量;构造深度学习模型:将所获得的驾驶人高维生物电信号分量作为输入,构建深度学习模型,获取驾驶人的驾驶意图;基于自动驾驶轮椅上的视觉系统、激光雷达系统、毫米波雷达系统,同步采集当前环境信息,构建实时环境安全评估;利用驾驶人的驾驶意图与获取的实时环境安全评估地图,采用信息融合方法,获得当前可通行区域地图,并在当前可通行区域地图基础上对驾驶人的驾驶意图进行安全性判断,并形成驾驶人意图安全决策;具有良好的应用前景。
成果资料
 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号