点赞
一种工件坐标系的标定方法及相关装置
发布时间:2022-05-06
基本信息
- 合作方式: 技术服务
- 成果类型:
价格
双方协商
行业领域
其他
成果描述
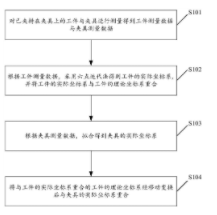
本申请公开了一种工件坐标系的标定方法,包括对已夹持在夹具上的工件与所述夹具进行测量得到工件测量数据与夹具测量数据;根据所述工件测量数据,采用六点迭代法得到所述工件的实际坐标系,并将所述工件的实际坐标系与所述工件的理论坐标系重合;根据所述夹具测量数据,拟合得到所述夹具的实际坐标系;将与所述工件的实际坐标系重合的所述工件的理论坐标系经移动变换后与所述夹具的实际坐标系重合。该方法能够对复杂曲面工件的工件坐标系进行精确标定。本申请还公开了一种工件坐标系的标定装置、设备及计算机可读存储介质,均具有上述技术效果。
成果资料
 微信公众号
微信公众号
 下载app
下载app
Copyright © 2022 中国科学技术协会 版权所有 | 京ICP备16016202号-20
 京公网安备 11010202008974号
京公网安备 11010202008974号